






В настоящее время одним из наиболее распространенных урологических заболеваний является мочекаменная болезнь с локализацией камня в мочеточнике. К основным методам активного удаления камней мочеточника относятся дистанционная ударно-волновая и контактная литотрипсия [1, 2, 3]. При невозможности их использования наряду с открытой хирургией могут применяться малоинвазивные методы хирургического вмешательства, такие как лапароскопическая или ретроперитонеоскопическая уретеролитотомия [4, 5, 6]. Многие авторы отдают предпочтение ретроперитонеоскопическому доступу, как менее травматичному, применяют газовый и безгазовый метод ретроперитонеоскопии [7, 8, 9].
Особенностью проведения малоинвазивных операций на органах забрюшинного пространства является необходимость тщательного выбора способа доступа и обеспечение точной установки портов. Это обусловлено тем, что зона работы ограничена небольшим по сравнению с объемом брюшной полости размером забрюшинного пространства. Визуализация объектов, находящихся в операционном поле, затруднительна, имеется опасность повреждения жизненно важных органов, что связано с анатомическими особенностями области операции [10]. Кроме того, при проведении ретроперитонеоскопической уретеролитотомии зачастую вызывает затруднение определение точной локализации камня в мочеточнике. Это может привести к увеличению времени проведения операции и стать причиной конверсии [11].
Правильный выбор точек и направления доступа к операционному полю и их точное указание на теле пациента обеспечивает эффективное проведение операции и создает условия для эргономичной и удобной работы хирурга [12]. Выбор доступа осуществляется по стандартным точкам, разработанным в соответствии с анатомией области операции с целью наименьшего травмирования сосудисто-нервных пучков брюшной стенки и поясничной области. Имеются рекомендации по стандартным участкам выполнения разреза кожи в зависимости от локализации камня в верхней, средней или нижней части мочеточника [13].
В связи с этим одним из сравнительно новых и перспективных направлений современной малоинвазивной хирургии является разработка методов предоперационного планирования на базе виртуальной модели по результатам томографического обследования. Метод применяют при планировании трудных операций по поводу опухолей почек и надпочечников, коралловидных камней почек. Для этого на основании предоперационного обследования создают виртуальную модель интересующего органа, трехмерное изображение которого позволяет рассмотреть его из различных положений, определить локализацию опасных зон, кровеносных сосудов, прилежания соседних органов [14, 15].
Перспективным является создание 3D модели области хирургического интереса с последующей ее адаптацией в режиме реального времени к пациенту непосредственно во время проведения операции [16, 17]. В настоящее время существуют различные подходы к созданию систем интраоперационной навигации, например, на базе стереоскопических видеокамер. Однако в них используются специализированные менты, программное обеспечение дорогостоящая аппаратура, а также они имеют ограниченную область клинического применения [18].
Таким образом, актуальной является задача разработка систем предоперационного планирования и интраоперационной навигации, ориентированных на использование стандартных форматов данных, не привязанных к конкретной томографической аппаратуре. Такие системы должны обеспечивать возможность создания 3D моделей операционного поля для планирования и проведения урологических операций, возможность выбора и контроля на модели оптимальных точек и направлений доступа для установки хирургического инструмента, возможность привязки полученной модели к пациенту для определения и визуализации точек и направления доступа непосредственно при проведении операции.
Целью данной работы явилась разработка аппаратно-программного комплекса (АПК) для определения и указания оптимальных «точек ввода» хирургического инструмента (троакара) на поверхности тела пациента на основе данных томографического обследования при проведении малоинвазивных операций, в частности, ретроперитонеоскопической уретеролитотомии.
Для достижения поставленной цели в работе решались задачи синтеза виртуальной модели пациента, выбора оптимальных путей доступа к зоне хирургического интереса, предоперационного планирования и оценки безопасности выбранного способа доступа, совмещения систем координат тела пациента с виртуальной моделью, проведения клинических испытаний.
МАТЕРИАЛЫ И МЕТОДЫ
Авторской группой ГБУ РКБ РМЭ и ПГТУ г. Йошкар-Олы разработан аппаратно-программный комплекс (АПК) для виртуального моделирования операционного пространства и выбора оптимальных точек малоинвазивного хирургического доступа (патент РФ № 127615 от 10.05.2013г. [19]). В состав комплекса входят персональный компьютер, оригинальное программное обеспечение и механический 3D дигитайзер.
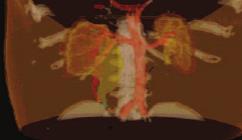
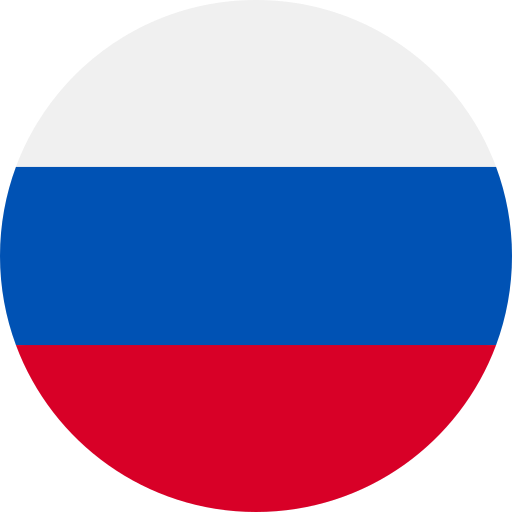
Рис. 1. Виртуальная модель пациента, включающая область хирургического интереса
Перед проведением предоперационного планирования выполняется обследование пациента на компьютерном томографе. Для обеспечения возможности последующей адаптации данных компьютерной томографии и виртуального моделирования на теле пациента закрепляются 4 рентгеноконтрастных метки. На основе анализа параметров рентгеновской плотности изображения в полученной томограмме производится сегментация тканей в пределах области хирургического интереса, и строится трехмерная модель тела человека в области предполагаемого вмешательства (рис.1). Изучение данной модели позволяет хирургу более точно локализовать камни в мочеточнике, оценить взаимное расположение органов и принять предварительное решение о способе хирургического доступа.
Далее определяются оптимальные пути доступа к области операции. Для этого на срезах томограммы хирург выделяет области хирургического интереса, к которым необходимо получить доступ при проведении операции, а на виртуальной модели указывается положение предполагаемой точки прокола на поверхности тела пациента. Вокруг данной точки осуществляется поиск допустимых путей к области локализации камня. Программой проверяется отсутствие для каждого возможного пути пересечений с тканями, через которые недопустимо производить проколы. В результате программа визуализирует множество разрешенных путей, среди которых хирург может выбрать наиболее предпочтительный (рис.2).
Далее производится окончательная оценка безопасности выбранного способа доступа. Для этого программа производит трассировку пути доступа через срезы томограммы (рис.3). Результат трассировки выводится на экран. По этим данным хирург может окончательно удостовериться в отсутствии пересечений раневого канала с жизненно важными органами, после чего этап предоперационного планирования завершается.
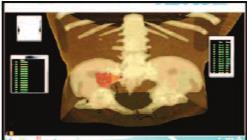
Рис. 2. Отображение возможных путей доступа к области хирургического интереса
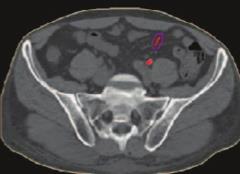
Рис.3. Трассировка пути доступа через срезы томограммы
Одним из ключевых этапов работы является непосредственная предоперационная адаптация виртуальной модели с телом пациента. Для этого необходимо выполнить сопоставление реперных точек на 3D модели с соответствующими точками на теле пациента. Данная операция производится с помощью 3D дигитайзера путем последовательного ввода в компьютер координат реперных точек (рис.4). В результате рассчитывается матрица преобразования систем координат и, в дальнейшем, перемещения в пространстве пера дигитайзера и его оси симметрии могут отображаться на виртуальной 3D модели.

Рис. 4. Механический 3D дигитайзер (а), ввод координат реперных точек (б) и отображение на модели оси симметрии пера дигитайзера (в)
После этого хирург может указать на теле пациента точки проколов, заданные на виртуальной модели, и определить требуемое направление прокола. В момент совпадения точки и направления пера дигитайзера с направлением, выбранным компьютерной программой, формируется звуковой сигнал. При этом на 3D модели контролируется текущее направление, на которое указывает перо дигитайзера.
Точки доступа, указанные компьютерной программой, оцениваются врачом-экспертом, выполняющим малоинвазивные операции на органах забрюшинного пространства.
РЕЗУЛЬТАТЫ
С применением описанного метода компьютерной оптимизации доступа ретроперитонеоскопическая уретеролитотомия была выполнена 17 (8 мужчин и 9 женщин) больным с камнем верхней трети мочеточника. Средний возраст составил 39,5 (25 – 56) лет. Размеры камня по данным компьютерной томографии составили в среднем 9 (7 – 14) мм. Камень располагался в правом мочеточнике у 10 больных, в левом – у 7 больных.
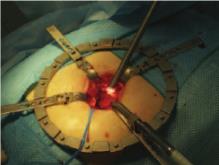
Рис. 5.Безгазовая ретроперитонеоскопия
Операция проводилась под общим обезболиванием. Больного укладывали на операционном столе в латеропозиции. Ретроперитонеоскопию выполняли двумя способами: безгазовым и с инсуффляцией газа. Безгазовую ретроперитонеоскопию выполнили 12 пациентам (рис.5). В указанной АПК точке производили разрез кожи, подкожной клетчатки длиной 3 – 4 см, межмышечным способом вскрывали забрюшинное пространВ забрюшинное пространство устанавливали ретроперитонеоскоп, кольцо с расширителями раны, далее операцию проводили под контролем ретроперитонеоскопа, при помощи специальных инструментов (рис. 6, 7).
Ретроперитонеоскопическая уретеролитотомия с инсуффляцией газа была произведена 5 больным. После создания полости в ретроперитонеоскопическом пространстве по методу Gaur [20] устанавливали первый троакар, поводили инсуффляцию газа под давлением 10 – 12 мм рт. ст. В точках доступа, определенных при помощи АПК устанавливали 2 рабочих троакара. Далее операцию проводили под контролем лапароскопа с использованием лапароскопических инструментов.
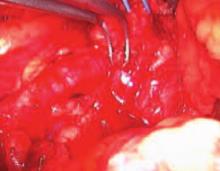
Рис. 6. Удаление камня мочеточника

Рис.7. Ушивание разреза мочеточника
После выделения верхней трети мочеточника с камнем вскрывали его стенку и производили удаление конкремента. Разрез мочеточника ушивали нитью «викрил» 4-0, предварительно выполнив контроль проходимости, устанавливали дренаж, удаляли троакары, ушивали троакарные раны.
При сравнении варианта хирургического доступа, выбранного при помощи компьютерной предложенного экспертом, совпадение точек доступа во всех случаях. Трудностей, связанных с неправильно выбранным доступом, а также конверсий не было. Время операции составило в среднем 39,5 (25-55) минут, кровопотеря – 50,0 (10-90) мл. У всех больных осложнений со стороны послеоперационной раны отмечено не было. Длительность лечения в стационаре составила в среднем 5,5 (4-7) дней.
ОБСУЖДЕНИЕ
Использование современных методов лечения камней мочеточника, таких как дистанционная и контактная литотрипсия, позволяет в большинстве случаев обойтись без оперативного вмешательства. Однако наличие крупных камней проксимального отдела мочеточника, неэффективность или невозможность уретероскопии и контактной литотрипсии является показанием для удаления камня мочеточника ретроперитонеоскопическим способом. Трудности визуализации мочеточника в забрюшинном пространстве, определения локализации камня может явиться причиной конверсии малоинвазивной операции в открытую. Одной из причин конверсии при малоинвазивных операциях является выбор точек доступа без учета индивидуальных особенностей пациента и локализации патологического процесса.
Использование АПК для определения точек хирургического доступа, установки троакаров при ретроперитонеоскопических операциях позволило провести предоперационное моделирование и планирование хирургического вмешательства, изучить возможные опасности, связанные с расположением окружающих зону вмешательств органов, выбрать оптимальные зоны для хирургического доступа.
Область применения разработанного АПК не ограничивается только проведением ретроперитонеоскопической уретеролитотомии, а может быть расширена и на другие урологические операции. Создание виртуальной модели операционного пространства и сопряжение ее с реальным пациентом в перспективе позволит осуществлять интраоперационную навигацию при проведении различных видео-эндоскопических операций, безопасное и точное введение зонда в зону заболевания при фокальной терапии.
Важным аспектом внедрения малоинвазиной практику является система обучения начинающих хирургов, которая проводится в специальных центрах с использованием муляжей, операций на животных, виртуальных хирургических вмешательств. Использование предложенного АПК в клинике, начинающей проведение видеоэндоскопических операций, позволит хирургу самостоятельно планировать малоинвазивную операцию, иметь «помощника» при выборе хирургического доступа и ориентировке в хирургическом пространстве.
ВЫВОДЫ
- Разработан АПК, позволяющий выбрать оптимальный хирургический доступ при проведении малоинвазивных хирургических вмешательств.
- Предложен оригинальный метод сопряжения системы координат виртуальной модели с пациентом.
- Разработана методика помощи хирургу при дооперационном планировании хирургической операции.
- Разработаны и реализованы следующие алгоритмы: – формирование виртуальной 3D модели пациента по результатам томографического исследования; – выделение «области хирургического интереса»; – поиск точек входа и направления пути доступа; – контроль безопасности формируемого раневого канала; – сопряжение системы координат виртуальной модели с пациентом.
- Разработанный АПК может быть использован при обучении начинающих хирургов навыкам выполнения малоинвазивных операций.
ЛИТЕРАТУРА
1. Колпаков И.С. Мочекаменная болезнь.М.: Академия, 2006.224 с.
2. Урология. Национальное руководство п/р Лопаткина Н.А. М. «ГЭОТАР – Медиа», 2009. С.1021.
3. Капсаргин Ф.П. Дисс. доктора мед. наук. Клиническое обоснование выбора метода хирургического лечения мочекаменной болезни. Красноярск, 2010. С. 21.
4. Fan T, Xian P, Yang L et al: Experience and learning curve of retroperitoneal laparoscopic ureterolithotomy for upper ureteral calculi // J Endourol. 2009. Vol. 23, N11 P. 1867-1870.
5. Степанов В.Н., Кадыров З.А. Атлас лапароскопических операций в урологии. М., «Миклош», 2001. 122 c.
6. Ретроперитонеоскопическая уретеролитотомия. Теодорович О.В., Забродина Н.Б., Галлямов Э.А., Калайгов О.В. // Урология. 2007. №4. 29 – 31 c.
7. Теодорович О.В., Луцевич О.Э., Забродина Н.Б. и др. Ретроперитонеоскопическая уретеролитотомия и её место в лечении уролитиаза. // Материалы первого Российского конгресса по эндоурологии 4-6 июня 2008. Москва, 2008. С. 329-332.
8. Комяков Б.К., Гулиев Б.Г., Алексеев М.Д. Ретроперитонеоскопическая уретеролитотомия // Эндоскопическая хирургия. 2009. №6. С. 32-35.
9. Безгазовая ретроперитонеоскопическая уретеролитотомия. Капсаргин Ф.П., Гульман М.И., Неймарк А.И. и др. // Каз. мед. журнал. 2010. T.91, №1. С.65 – 68.
10. Anderson K, Kabalin J, Cadeddu J. Surgical Anatomy of the Retroperitoneum, Adrenals, Kidneys, and Ureters in Walsh PC, Retik AB, Vaughan ED Jr, Wein AJ eds, Campbell’s Urology, 9th ed., Philadelphia, Saunders, 2008; Chapt 1, P. 32-37.
11. Неймарк А.И., Рублевский Б.В., Рублевский В.П. Ретроперитонеоскопия в хирургии органов забрюшинного пространства: диагностические, лечебные возможности и осложнения ретроперитонеоскопии // Сибирский медицинский журнал. 2009. №4, Вып.1. С.84 – 87.
12. El-Moula MG, Abdallah A, El-Anany F et al: Laparoscopic ureterolithotomy: our experience with 74 cases // Int J Urol. 2008. Vol. 15, N7. P. 593-597.
13. Галеев, Р.Х., Дубровин В.Н. Операции из мини-доступа в урологии. Казань, 2008. 39 c.
14. Применение метода интраоперационной навигации при лапароскопической нефрэктомии. С.И. Емельянов, В.А. Вердченко, Д.Ю. Пушкарь и др. // Эндоскопическая хирургия. 2009. №2. С.32 – 35.
15. Аляев Ю.Г., Дзеранов Н.К., Григорев Н.А. и др. 3-D моделирование при коралловидном нефролитиазе. // Материалы XII съезда Российского общества урологов. Москва. 2012. 166 c.
16. Ukimura O., Gill IS. Image-assisted endoscopic surgery: Cleveland clinic experience // J.Endourology 2008. Vol. 22, P. 803-810.
17. Dubrovin VN. Bashirov VY., Tabakov A., Egoshin A. Application of computer optimization method of minimally invasive surgical access based on pre-surgical tomography data // Urol. 2012. Vol. 80, Suppl. 3A P. 57.
18. Augmented reality during robot-assisted laparoscopic partial nephrectomy: toward real-time 3D – CT to stereoscopic video registration. Su L.M., Vagvolgyi B.P., Agarwal R. et al // Urol. 2009. Vol. 73. P. 896 – 900.
19. Дубровин. В.Н., Баширов В.И., Фурман Я.А., Роженцов А.А., Кудрявцев А.А., Ерусланов Р.В., Баев А.А., Назаров И.Л. Аппаратно-программный комплекс для определения мест установки троакаров при лапароскопических операциях. Патент РФ на полезную модель №127615 от 10.05.2013. Заявка 2012135049/14 от 15.08.2012.
20. Gaur DD., Trivedi S., Prabhudesai MR., Madhusudhana HR. et al. Laparoscopic ureterolitotomy: technical considerations and long-term follow-up // BJU Int 2002. Vol. 89. P. 339-43.
