






ВВЕДЕНИЕ
По мере увеличения количества проведения радикальной робот-ассистированной простатэктомии возрастает и важность оценки хирургических навыков при проведении данного оперативного вмешательства. Важно систематически оценивать хирургические навыки каждого хирурга, который выполняет робот-ассистированные оперативные вмешательства, чтобы определить текущую позицию этого хирурга на кривой обучения [1]. Кривая обучения – это период, во время которого происходит совершенствование хирургических навыков, благодаря различным тренировочным и образовательным методикам [1, 2].
Продолжительность кривой обучения характеризуется минимальным числом выполненных операций, необходимым для выхода на плато удовлетворительных результатов.
Однако автоматически и количественно оценить хирургические навыки во время роботизированной хирургии сложно, поскольку эти навыки в первую очередь связаны с движением хирургических инструментов. Отслеживание движений хирургических инструментов во время радикальной робот-ассистированной простатэктомии (РАРП) является важным шагом на пути к автоматизации измерения технических навыков хирурга [1].
Было показано, что показатели движения хирургических инструмента, рассчитанные на основе траектории движения инструмента, коррелируют с опытом хирурга, прогрессом кривой обучения и показателями результатов лечения пациентов [2].
Как правило, расчет показателей движения инструмента возможен только непосредственно с использованием кинематических выходных данных робота [1, 2]. Но применение методов компьютерного зрения для генерации и получения данных о положении инструмента позволит рассчитывать показатели движения хирургических инструментов исключительно на основе видеозаписи оперативного вмешательства, не полагаясь на выходные данные конкретного хирургического устройства.
Технические навыки хирурга обычно оцениваются экспертами во время видеообзора с использованием рейтинговых шкал, которые присваивают числовые значения конкретным характеристикам, проявляемым движениями хирурга [3]. Например, шкала Глобальной оперативной оценки навыков лапароскопии (GOALS) использует пятибалльную шкалу Лайкерта для оценки восприятия глубины хирурга, бимануальной ловкости, эффективности и умения работать с тканями. Оценки GOALS иногда также используются в качестве основы для сравнения других методов оценки технических навыков хирурга. Вместо того, чтобы полагаться на ручную проверку, в ряде исследований изучались методы автоматизации оценки технических навыков на основе модели движений хирурга. Для модели движения хирурга можно рассчитать интересующие показатели, такие как длина пути, скорость, ускорение, угол поворота и кривизна инструментов, и использовать их для определения уровня квалификации хирурга [4-5]. Кроме того, было выявлено, что показатели плавности движений, такие как рывки, указывают на недостаточное мастерство выполнения задачи, что можно использовать для измерения прогресса хирурга по кривой обучения [6].
Существующие работы показали возможность использования подходов на основе численных показателей для ранжирования хирургов с разным уровнем технических навыков [7].
МАТЕРИАЛЫ И МЕТОДЫ
На базе клиники Башкирского государственного медицинского университета в сотрудничестве с федеральным государственным автономным образовательным учреждением высшего образования «Томский государственный университет систем управления и радиоэлектроники» была проведена интерпретация хирургических инструментов в поле зрения роботического комплекса Da Vinci Xi. Для определения оценки движений хирурга нами использовалась нейросеть YOLOv8 (You Only Look Once) – семейство моделей обнаружения объектов на базе YOLO (Ultralytics Inc). YOLOv8 – это детектор объектов реального времени, представляющий собой единую платформу для обучения моделям обнаружения объектов, сегментации экземпляров и классификации изображений.
Для отслеживания хирургических инструментов в поле зрения в программе реализованы несколько алгоритмов трекинга.
Для распознавания движения инструментов хирурга был создан собственный датасет для дообучения модели детекции новых объектов. Всего для наполнения датасета было проанализировано 40000 кадров операций, в которых определены 60000 инструментов. Данные вычисления составлены на основании анализа 30 оперативных вмешательств, которые, в свою очередь, состоят из 1500 фреймов, а именно робот-ассистированной радикальной простатэктомии, выполненной двумя хирургами. Из них хирург 1 выполнил 14 оперативных вмешательств, а хирург 2 – 16 оперативных вмешательств.
Проводился анализ 4-х видов хирургических инструментов, применяемых при данном оперативном вмешательстве, а именно Fenestrated Bipolar Forceps, ProGraps Forceps, Monopoles Curved Scissors, Large Needle Driver. Так же проводилась оценка длительности оперативного вмешательства и сравнение методики двух хирургов.
РЕЗУЛЬТАТЫ И ОБСУЖДЕНИЕ
На базе клиники Башкирского государственного медицинского университета был проведен анализ 30 робот-ассистированных радикальных простатэктомий, из которых 14 операций провел хирург 1 и 16 операций провел хирург 2 (табл. 1).
Таблица 1. Сравнительная характеристика показателей робот-ассистированных простатэктомий, проведенных хирургами 1 и 2
Table 1. Comparative characteristics of the indicators of robot-assisted prostatectomies performed by surgeons 1 and 2
| Показатели Indicators |
Хирург 1 Surgeon 1 |
Хирург 2 Surgeon 2 |
|---|---|---|
| Время оперативного вмешательства Time of surgical intervention |
102,8 мин/min | 90,6 мин/min |
| Соотношения времени и расстояния для хирургических инструментов | ||
| Fenestrated Bipolar Forceps | 36,4 м/m | 12,6 м/m |
| ProGraps Forceps | 8,8 м/m | 25,7 м/m |
| Monopoles Curved Scissors | 25,4 м/m | 41,2 м/m |
| Large Needle Driver | 17,2 м/m | 10,2 м/m |
Исходя из полученных нами данных, можно сделать вывод, что средняя продолжительность роботассистированной простатэктомии составляет 102,8 минут для хирурга 1 и 90,6 минут для хирурга 2. Также в ходе оперативного вмешательства хирург 1 в наибольшей степени задействует такие хирургические инструменты, как Fenestrated Bipolar Forceps 36,4 метра и Monopoles Curved Scissors 25,4 метра. Хирург 2 же в основном использует ProGraps Forceps 25,7 метров и Monopoles Curved Scissors 41,2 метра. В то же время по мировым данным среднее время операции составляло 246 минут [8-10]. При этом по мере накопления опыта данный показатель снижался. Робот-ассистированная радикальная простатэктомия в среднем состоит из 12 этапов: мобилизация сигмовидной кишки, мобилизация мочевого пузыря, мобилизация и пересечение шейки мочевого пузыря, мобилизация задней стенки с выделением семенных пузырьков, мобилизация боковых стенок с пересечением правого и левого сосудисто-нервных пучков, пересечение дистального отдела уретры, задняя реконструкция стенки мочевого пузыря и уретры, наложение уретро-везикального анастомоза и передняя реконструкция стенки мочевого пузыря и уретры. Также проводится подвздошно-запирательная лимфаденэктомия с обеих сторон. Тогда как по мировым стандартам не всегда проводится задняя реконструкция стенки мочевого пузыря и уретры [11-13].
Пример расчета и построения графика координат хирургических инструментов в каждый момент времени и расстояние, пройденное ими за весь период оперативного вмешательства, отображены на рисунке 1 для хирурга 1 и рисунке 2 для хирурга 2.
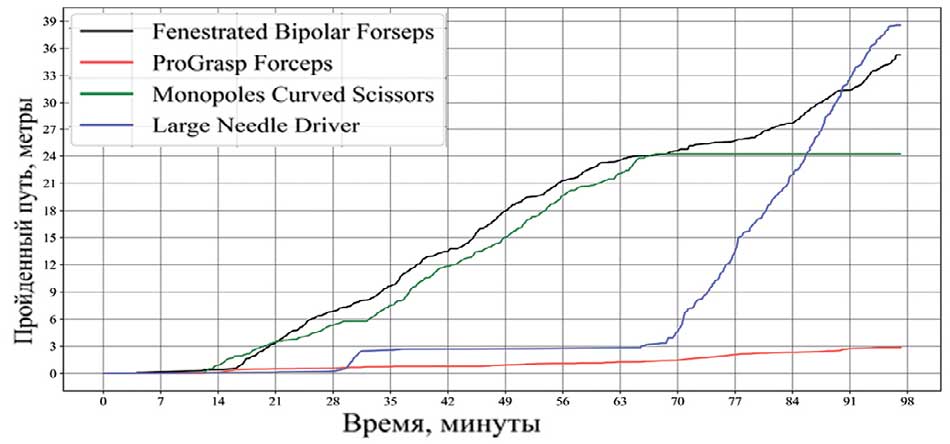
Рис. 1. Соотношения времени и расстояния для хирургических инструментов (хирург 1)
Fig. 1. Time and distance relationships for surgical instruments (surgeon 1)
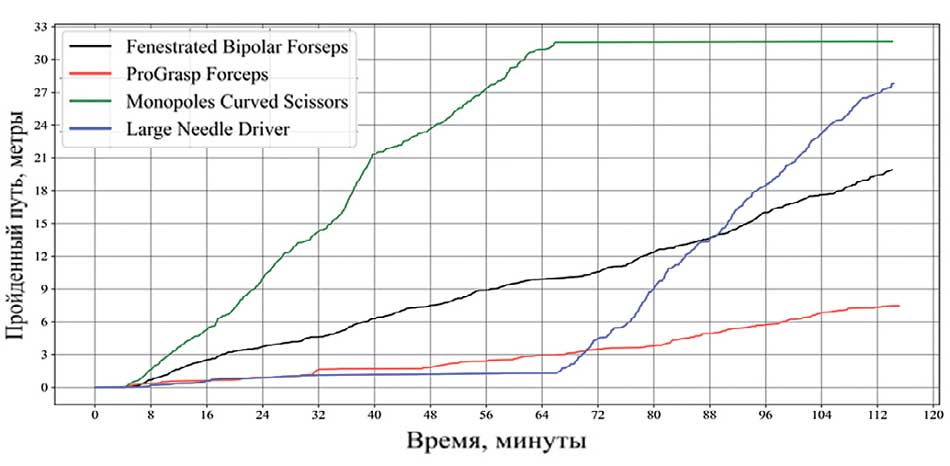
Рис. 2. Соотношения времени и расстояния для хирургических инструментов (хирург 2)
Fig. 2. Time and distance relationships for surgical instruments (surgeon 2)
ЗАКЛЮЧЕНИЕ
Таким образом, исследование анализа времени движения инструментов является важным шагом в направлении оптимизации ресурсов и повышения эффективности медицинского процесса. Дальнейшие исследования и разработки в этой области позволят нам получить более глубокое понимание движения роботических инструментов и разработать инновационные методы и техники для оптимизации работы хирурга.
ЛИТЕРАТУРА
- Рябов М.А., Бядретдинов И.Ш., Котов С.В. Кривая обучения лапароскопической и робот-ассистированной радикальной простатэктомии. Экспериментальная и клиническая урология 2021;14(4):37-43. [Ryabov M.A., Byadretdinov I.S., Kotov S.V. Robot-assisted and laparoscopic radical prostatectomy learning curve. Eksperimental'naya i klinicheskaya urologiya = Experimental and Clinical Urology 2021;14(4):37-43 (In Russian)]. https://doi.org/10.29188/2222-8543-2021-14-4-37-43.
- Унгурян В.М., Круглов Е.А., Побединцева Ю.А. Кривые обучения в минимальноинвазивной онкохирургии. Эндоскопическая хирургия 2020;26(4):54-8. [Unguryan VM, Kruglov EA, Pobedintseva YuA. Learning curves in minimally invasive oncology. Endoskopicheskaya khirurgiya = Endoscopic Surgery 2020;26(4):54-8. (In Russian)]. https://doi.org/10.17116/endoskop20202604154.
- Lee D, Yu HW, Kwon H, Kong HJ, Lee KE, Kim HC. Evaluation of surgical skills during robotic surgery by deep learning-based multiple surgical instrument tracking in training and actual operations. J Clin Med 2020;23;9(6):1964. https://doi.org/10.3390/jcm9061964.
- Lee D, Yu HW, Kim S, Yoon J, Lee K, Chai YJ, et al. Vision-based tracking system for augmented reality to localize recurrent laryngeal nerve during robotic thyroid surgery. Sci Rep 2020;10(1):8437. https://doi.org/10.1038/s41598-020-65439-6.
- Yamazaki Y, Kanaji Sh, Matsuda T, Oshikiri T, Nakamura T, Suzuki S, et al. Automated surgical instrument detection from laparoscopic gastrectomy video images using an open source convolutional neural network platform. J Am Coll Surg 2020;230(5):725-732e1. https://doi.org/10.1016/j.jamcollsurg.2020.01.037.
- Yu,F., Silva Croso G, Kim TS, Song Z, Parker F, Hager GD, et al. Assessment of automated identification of phases in videos of cataract surgery using machine learning and deep learning techniques. JAMA Netw Open 2019;2(4):e191860. https://doi.org/10.1001/jamanetworkopen.2019.1860.
- Khalid Sh, Goldenberg M, Grantcharov T, Taati B, Rudzicz F. Evaluation of deep learning models for identifying surgical actions and measuring performance. JAMA Netw Open 2020;2;3(3):e201664. https://doi.org/10.1001/jamanetworkopen.2020.1664.
- Lee D, Yu HW, Kwon H, Kong HJ, Lee KE, Kim HCh. Evaluation of surgical skills during robotic surgeryby deep learning-based multiple surgicalinstrument tracking in training andactual operations. J Clin Med 2020;9(6):1964. https://doi.org/10.3390/jcm9061964.
- Медведев В.Л. Робот-ассистированная лапароскопическая радикальная простатэктомия. Вестник урологии 2018;6(4):67-76. [Medvedev V.L. Robot-assisted laparoscopic radical prostatectomy. Vestnik urologii = Urology Herold 2018;6(4):67-76. (In Russian)]. https://doi.org/10.21886/2308-6424-2018-6-4-67-76.
- Клинические рекомендации «Рак предстательной железы» Министерство Здравоохранения Российской Федерации, 2023 г. [Clinical guidelines «Prostate Cancer» Ministry of Health of the Russian Federation, 2023 (In Russian)].
- Клинические рекомендации «Лапароскопическая робот-ассистированная радикальная простатэктомия» 2023 г. [Clinical guidelines «Laparoscopic robotassisted radical prostatectomy» 2023 (In Russian)].
- Мосоян М.С., Федоров Д.А., Айсина Н.А., Васильев А.А. Клинический случай: робот-ассистированная лапароскопическая радикальная простатэктомия у пациента с выраженной средней долей. Трансляционная медицина 2020;7(1):76-83. [Mosoyan M.S., Fedorov D.A., Aysina N.A., Vasiliev A.A. Case report: robot-assisted laparoscopic radical prostatectomy in patient with large median lobe. Translyatsionnaya meditsina = Translational Medicine 2020;7(1):76-83. (In Russian)]. https://doi.org/10.18705/2311-4495-2020-7-1-76-83.
- Виланд В.Ф., Бургер М., Дензингер С., Отто В., Павлов В.Н. Радикальная простатэктомия: от открытой хирургии до роботизированной лапароскопической операции. Креативная хирургия и онкология 2020;10(2):87-93. [Wieland W.F., Burger M., Denzinger S., Otto W., Pavlov V.N. Radical prostatectomy: from open surgery towards robotic laparoscopy. Kreativnaya khirurgiya i onkologiya = Creative surgery and oncology 2020;10(2):87-93. (In Russian)]. https://doi.org/10.24060/2076-3093-2020-10-2-87-93.
